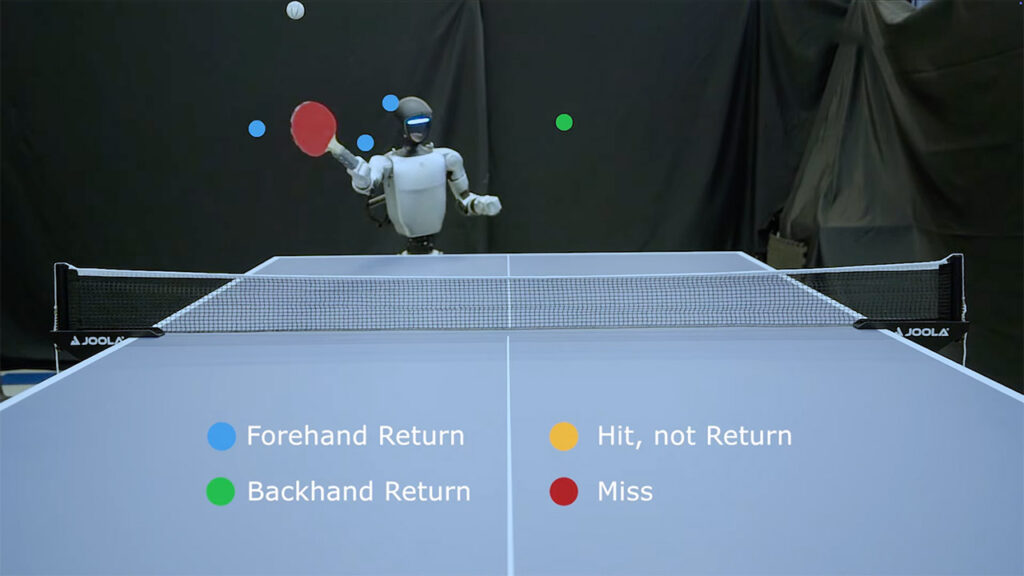
At a table tennis setup, a humanoid robot grips a paddle and smashes a forehand shot clean across the net. This is UC Berkeley’s latest innovation, the HumanoId Table TEnnis Robot, or HiTTER. The machine can keep rallies going for more than 100 shots against human players, with precision, speed, and movements that feel almost natural.

HiTTER’s abilities come from a dual system designed to imitate how people play the game. The high-level planner acts as the brain, using external cameras to follow the ball and predict its landing spot. From there, it calculates the exact timing, speed, and positioning needed for the return. The low-level controller serves as the body, turning those instructions into fluid arm and leg movements. Trained with human motion data, it sidesteps, pivots, and swings in ways that look strikingly realistic. With reaction times under one second, HiTTER can handle balls moving at up to 5 meters per second.
Training a robot to handle table tennis is no easy feat, as the sport demands instant decisions, sharp hand-eye coordination, and adaptability against unpredictable returns. Berkeley’s researchers combined two strategies to make it possible. The first was a model-based planner that maps the ball’s path to plan each response. The second was reinforcement learning, where the robot fine-tunes its actions through trial and error. This combination helped HiTTER copy the swings and footwork of human players, making its movements effective and surprisingly lifelike. The end result is a robot capable of rallying 106 shots with a person and even competing against another humanoid.

The system was tested on a general-purpose humanoid robot, believed to be the Unitree G1, proving it could handle real match conditions. HiTTER managed long rallies with human players, tracking the ball, repositioning itself, and striking consistently. It also played against another humanoid robot, showing reliable exchanges that highlighted its versatility. This isn’t just a party trick, it demonstrates a robot performing tasks that demand quick responses and physical skill in unpredictable environments.
The lessons from HiTTER extend well beyond table tennis. The sport is an ideal testbed because of its speed, precision, and dynamic conditions. The same methods that allow HiTTER to counter a topspin serve could one day be applied to robots managing busy warehouses, assisting in households, or even carrying out delicate surgeries. Berkeley’s layered approach, which separates planning from movement while keeping them interconnected, offers a model for machines to interact with the world in more human-like ways. By basing training on human motions, the team is developing robots that move intuitively, making them more practical and easier to integrate into daily life.



